TECHINFO
川の中に置かれた柱の後方に渦が発生する現象は、1513年レオナルド・ダ・ビンチによって観察されています。その後、流体の流れの中に置かれた物体の下流に交互に並んだ規則正しい渦列が発生することを、1911年にテオドール・フォン・カルマンが初めて理論的に解明しました。この渦列は彼の名にちなみ、カルマン渦列と呼ばれています。
自然界では「風に吹かれて旗がはためく」、「風で電線がうなる」、「小川の杭にかかった水草がゆれる」などは、このカルマン渦により起こります。
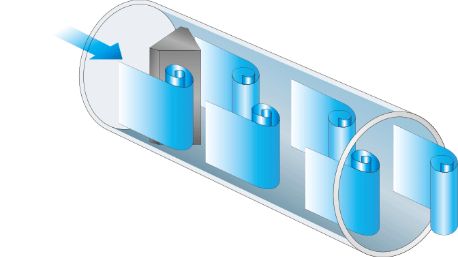
渦流量計は上図のように配管内にカルマン渦を発生させる「渦発生体(ブラッフボディ)」と渦を検出するセンサ及びセンサで検出した信号を処理する変換器(アンプ)から成っています。流れの中に直角に置かれた渦発生体の下流には、前述のカルマン渦が発生します。 このカルマン渦の発生する周波数は、流体の流れる速さ(流速)に比例していることが知られており、その関係式は以下のようになります。
f = St V d
ここで、f は渦周波数、V は流体の平均流速、d は渦発生体の幅、St はストローハル数と呼ばれる定数です。ストローハル数はレイノルズ数(流れの状態を決める数値)により変化しますが、広いレイノルズ数範囲においてほぼ一定となります。したがって、ストローハル数が一定の範囲では、渦周波数は流速に比例し、結果的に渦周波数を検出することによって配管内の流速が分かり、その流速に配管の断面積を乗じることによって最終的には流量(容積流量)を求めることが出来ます。
渦を検出する素子は数多く開発、実用化されていて、それぞれの特徴を生かした分野で使われています。主な検出素子と検出原理を下表に示します。現在は、構造がシンプルで耐久性が高く比較的価格の安い圧電素子式が主流です。
| 検出素子 | 分類 | 渦検出のプロセス | ||||
|---|---|---|---|---|---|---|
| 圧電素子 | 圧力変化 | 渦発生→ | 差圧発生→ | 力の変化→ | 圧電素子の応力変化→ | 電荷変化 |
| ストレンゲージ | ストレンゲージに生ずる歪み→ | 抵抗変化 | ||||
| 容量センサ | ダイヤフラム変化→ | 静電容量変化 | ||||
| シャトル ピストン |
ピストンの上下動→ | 電圧変化 | ||||
| サーミスタ | 流速変化 | 流速の変化→ | サーミスタの温度変化→ | 抵抗変化 | ||
| 超音波 | 音波伝搬速度変化→ | 周波数変化 | ||||
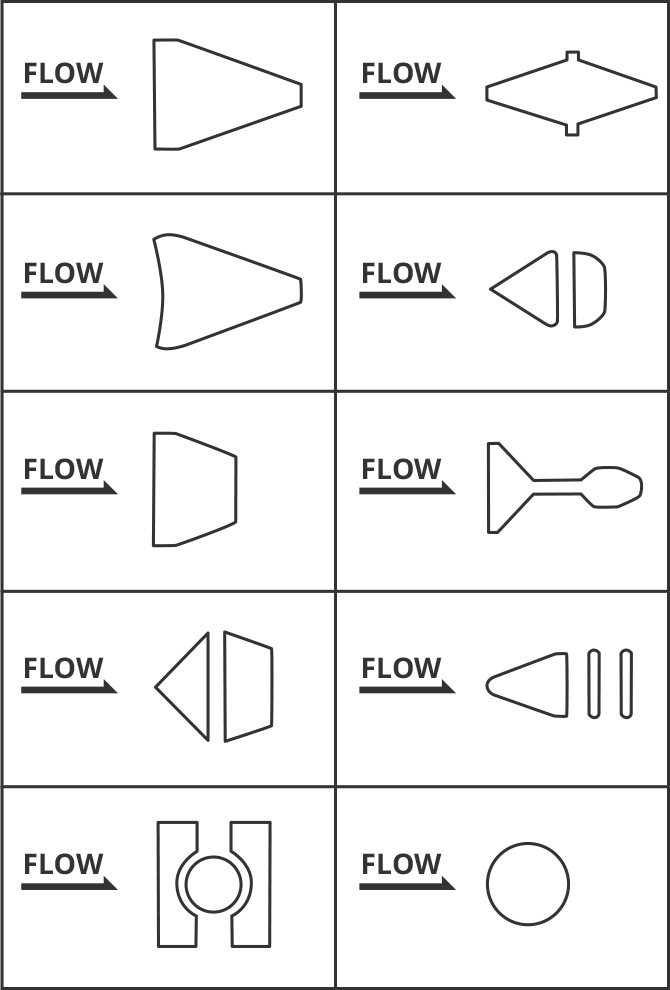
渦発生体の形状は流量計の性能に直接影響するため、各種の形状が実用化されています。現在までに実用化されている渦発生体の形状例を右に示します。カルマン渦の剥離点を安定化させるために、エッジがシャープな形状が多いことが分かると思います。
当社では渦発生体形状に三角柱(右図左上)を採用しています。機種名称である「デルタ」は、この三角柱がギリシャ文字のデルタ(Δ)に似ているところから名付けられました。
最近は、ほとんどのメーカが台形または三角の渦発生体を採用しています。そこで産業技術総合研究所、流量計メーカ、ユーザが一体となり、この形状に的を絞って最も性能の良い渦発生体を決定し、世の中に提供しようと言う研究会も生まれました。そこから見いだされたのが標準渦発生体という形状で、これは三角柱(デルタ)の形状をしています。これは逆に言えば当社が採用している形状が、オーソライズされたと言う見方も出来ます。
渦流量計の特徴として
などが挙げられます。また、渦流量計は計測原理上以下の点に注意が必要です。
しかし、多種多様な流体を簡便に高精度で安定して計測できる渦流量計は、今後ますます普及するものと考えられます。