TECHINFO
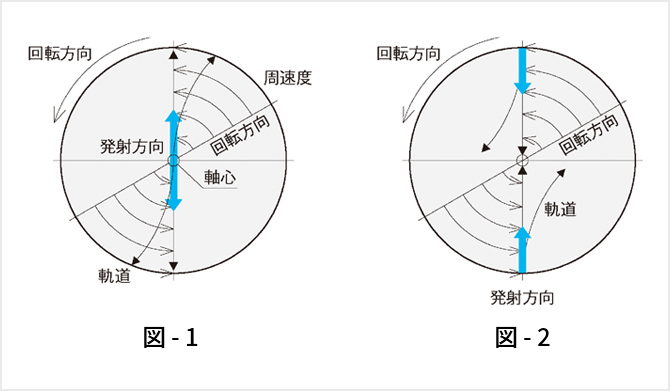
コリオリの力は、フランスの機械技術者であるGaspard Coriolis(1792年生れ)が発見し、数学的にその力を証明した事から、彼の名前にちなんでコリオリの力として今日に至っています。彼の発見は、次のようなものです。回転円盤上の軸芯から外周方向(周速の早く成る方向)に向かって、図-1の如く球を真っ直ぐ発射した時、球の軌道は回転方向に逆らう方向に軌道がずれて行く、又これとは逆に回転円盤上の外周から軸芯周速の遅くなる方向に向かって、図-2の如く球を真っ直ぐ発射した時、球の軌道は回転方向に従う方向に軌道がずれて行くと言うものです。ずれる即ち、力が発生していると言う事と、この力を数学的に証明し確立させたのが、コリオリと言う人物だったのです。
さて、赤道上で発生した台風の軌道及び渦が北半球では北上しながら右(東)に反れながら左回転(左渦巻き)し、南半球では南下しながら右(東)に反れながら右回転(右渦巻き)する事は気象衛星の画像で良く知られています。赤道上(周速の大きい所)で発生した台風が、北極(周速の遅い方向)に向かって北上すれば回転方向に流され右へ右へと軌道修正されます。又、同じく赤道上(周速の早い方)から南極(周速の遅い方)へ台風が南下すれば同様に回転方向に流され右へ右へと軌道修正される力が作用します。発生する渦が北半球では左渦となり、南半球では右渦となる事もコリオリの力によるものですが、簡単には説明出来ません。ここでは台風の軌道についてのみの説明とさせていただきます。壮大な地球上の気象現象がコリオリの理論によって証明されるとは、何とも痛快な話ではありませんか。
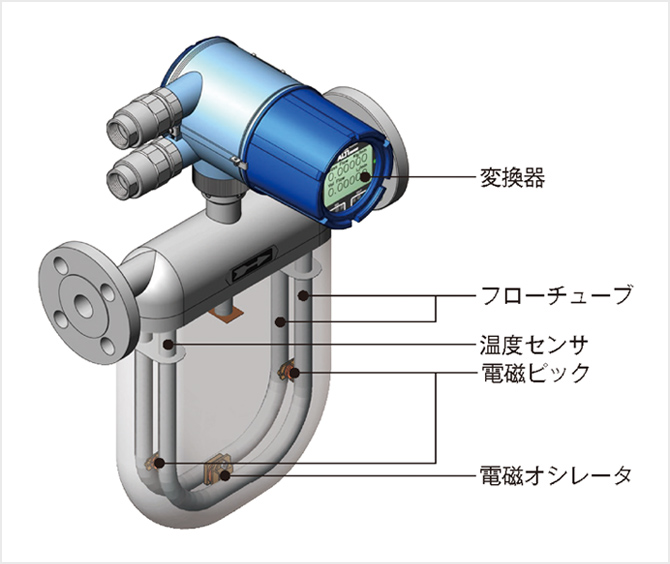
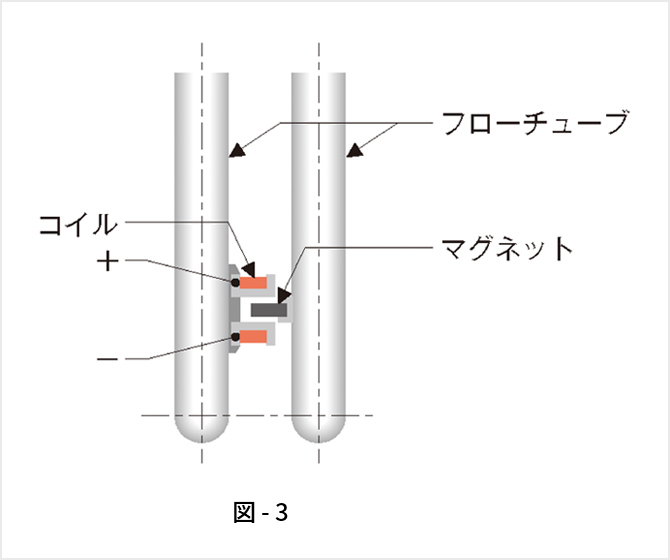
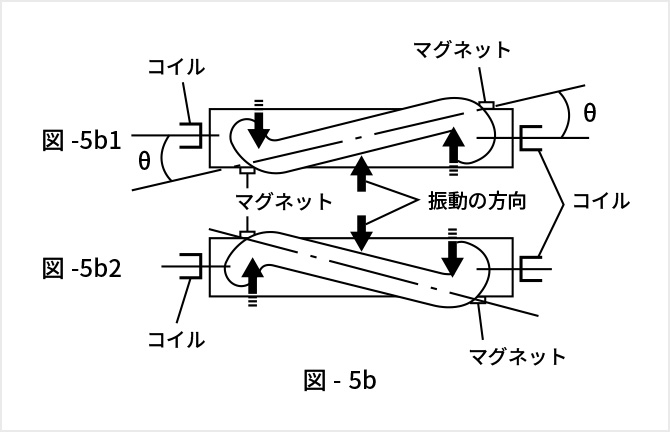
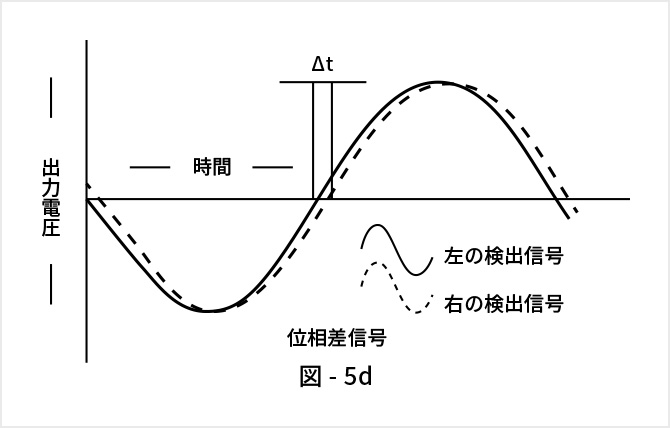
基本的に機械部品としては流出流入口のフランジと流路を2本に分けるマニフォールドそして2本のフローチューブだけで構成されています。流体はフランジを通過しマニフォールドにて2本のフローチューブに分けられフローチューブを通過した流体はマニフォールドで合流しフランジから出ていきます。この時、質量流量を計測する電気部品ととして左右に電磁ピックオフ、電磁オシレータそして温度センサが図の如く配置されています。 電磁ピックオフ、電磁オシレータは単なるマグネットとコイルの組み合わせで、一方のチューブにマグネットが固定されもう一方のチューブにはコイルが固定されています。電磁ピックオフは左右に2箇所に取り付けられチューブのねじれによる位相差信号を検出します。
電磁オシレータはチューブを固有振動数で振動させる働きをします。温度センサはチューブの熱変化(流体温度の変化に依存する)による弾性係数を補正するための働きをします。
この様に構造が単純且つシンプルで部品点数も極めて少ないため製作が容易だと考えられますが、各部品の溶接に真空炉を用いた最先端技術とコンピュータソフトを駆使したエレクトロニクス技術無くしては実現出来ない流量計であることを知っていただきたいと思います。
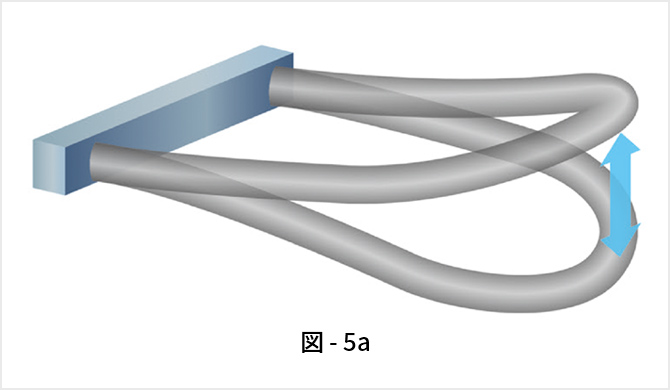
まず、フローチューブをトンネル、そして流体をバスに例えて話を進めて見たいと思います。今、図-4の如くUの形をしたトンネルがあると考えて下さい。そこに時速Vでバスが通過しようとしています。バスは列車の如く連続的に通過しているものと考えて下さい。このトンネルの入り口、出口を振動の支点としてトンネルUが図-5の如く振動しているとします。何故振動させなくてはいけないか、と言うと振動させなければ何も起こらないからです。即ち、走っているバスも又、トンネルにも何も変化が起こらないと言うことです。この振動はトンネルに変化を引き起こすための、なくてはならない必要条件なのです。実際にどのタイプのコリオリ流量計もその接続されたトランスミッタの電源を投入した瞬間にチューブが振動し始めることはコリオリ流量計を使用している方は周知の事実として経験なさっているはずです。
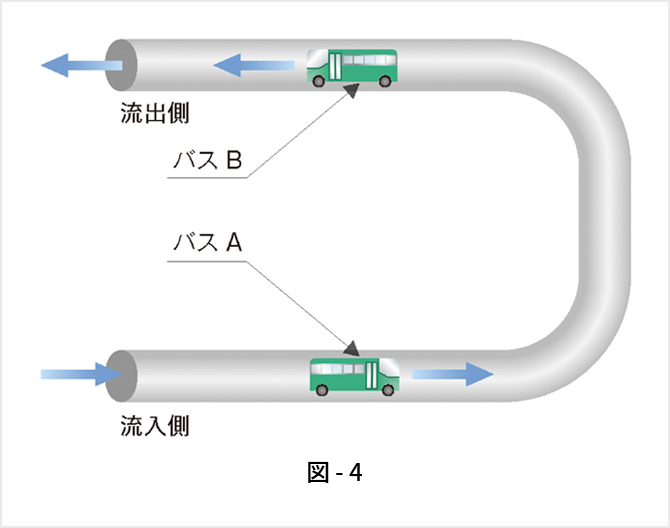
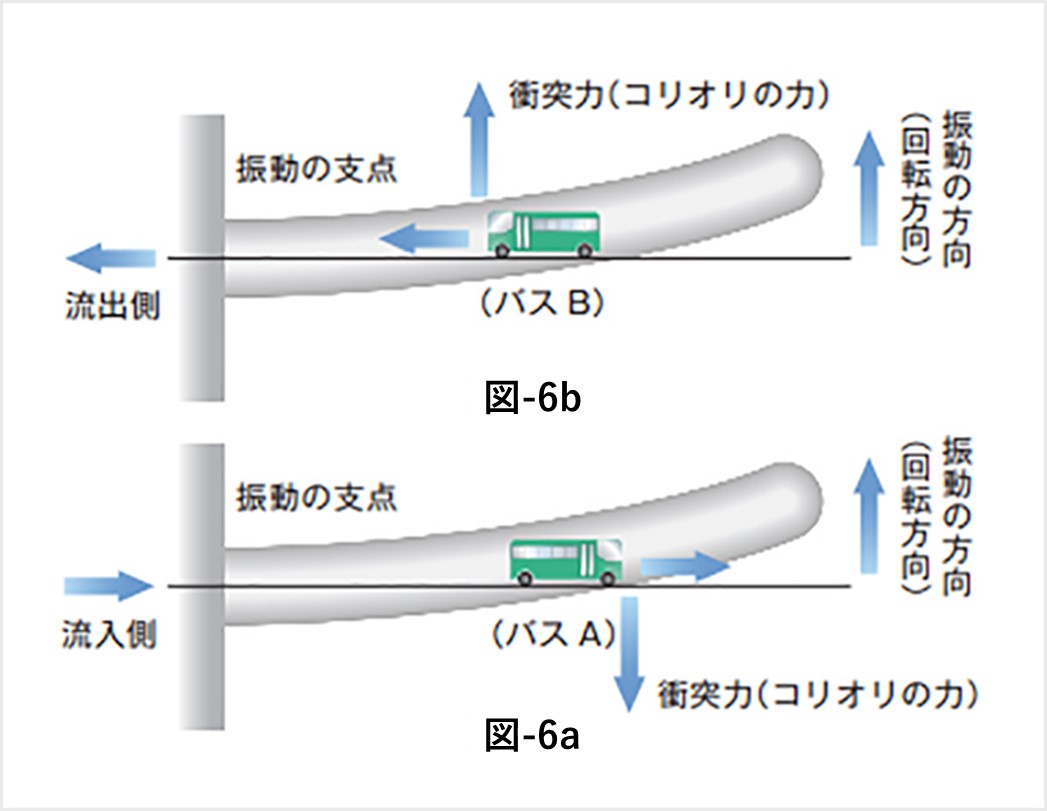
さてトンネルの話に戻りましょう。トンネルを通過中のバスが図-4及び図-6の如く、真っ直ぐ水平に走っています。バスA、とバスBはそれぞれ方向が逆であることに注意してください。
振動のため、次の瞬間、トンネルが図-6aの如く跳ね上がって来た時バスAは同図の如くトンネルの地面に衝突し、バスBは図-6bの如くトンネルの天井に衝突します。即ち、トンネルの瞬間の動きに対してバスAは図-6aの如くバスの地面に対する衝突力Aを発生させバスBは図-6bの如くバスの天井に対する衝突力Bを発生させます。この衝突力ABが互いに逆方向に作用する為、この時初めてトンネルがねじられる方向(図-5b参照)に変化を始めるのです。
ここで衝突力と仮定しているのをコリオリの力と考えてください。
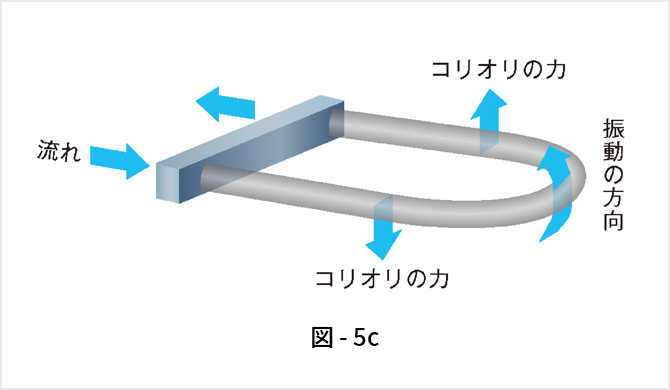
コリオリの力で説明すると、バスAは振動の始点からチューブの先端方向(チューブ変位速度の早く成る方向)に向かって行く為、冒頭でコリオリの力を説明した様にバスAは振動の方向(回転方向)に逆らう方向に移動しようとする力を発生します、又これとは逆にバスBはチューブの先端(変位速度の早く成る方向)からに振動の始点(チューブ変位速度の遅く成る方向)向かって行く為、バスBは振動の方向(回転方向)に従う方向に移動しようとする力を発生します。(図-5cと図-6a/図-6bを見比べてください)
以上の説明で、何故ねじれるのかが、概念的に理解できたはずです。では次に何故ねじれ角が質量流量に比例するのか?
ここまで来ればこの説明は非常に簡単になります。即ち、トンネルの中を同じ大きさの、「空のバス」が走るのか「満員のバス」が走るのかを考えた時、当然ねじれを発生させる為の、衝突力に大きな差が出る事がお解りだと思います。当然の事ながら「満員のバス」の衝突力ABの方が「空のバス」の衝突力ABと比較して、大きくなります。従ってねじれ角も大きくなる為、ねじれ角はバスの大きさに関係なくバスの重さに関係する要素(信号)と成るわけです。何故ねじれ角が質量流量に比例するのか、お解りいただけたはずです。
ここが容積流量計との大きな違いと言えます。容積流量計はバスの一台二台…の台数は感知出来ますが、バスに乗っている人の重さまでは感知出来ないのです。
言い換えますと、容積流量計は1リッター2リッターは計測できますが、同じ1リッターでも重たいのか、軽いのか感知出来ないのです。
ここで初めて、かの有名なコリオリの力(F=反力A=反力B)が次式で示されることが、実感出来るはずです。
F = 2mωV
F:コリオリの力
m:バスの質量
ω:トンネルの角速度(チューブの単振動)
V:バスの速度
参考までに記載しました。
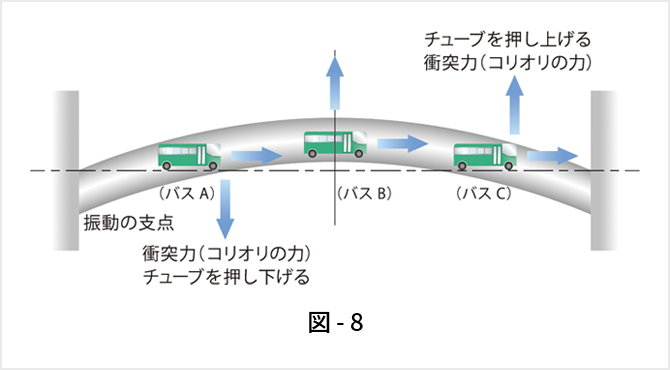
いわゆるストレート直管タイプの計測原理も、今回試みたバスとトンネルで考えれば良いわけで、これも簡易な解説で動作原理を説明したいと思います。前示同様に、フローチューブをトンネル、そして流体をバスに例えて見たいと思います。今、図-7の如く一本のトンネルがあると考えてください。そこに時速Vでバスが通過しようとしています。バスは列車の如く連続的に通過しているものと考えてください。この真っ直ぐなトンネルが入り口、出口を振動の支点としてトンネルの中央が最大振幅となる様、図-7の如く振動しているとします。何故振動させなくてはいけないか、と言うことは、すでに前にお話しした通りです。
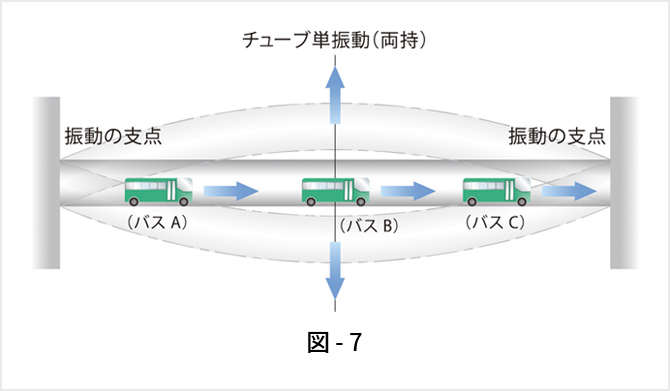
さて、トンネルを通過中のバスが図-7の如く、真っ直ぐ水平に走っています。図-7及び図-8の位置にあるそれぞれのバスをバスA、バスBとバスCとします。次の瞬間、振動のため、トンネルが図-8の如く跳ね上がって来た時バスAが同図の如くトンネルの地面に衝突し、バスCは同図の如くトンネルの天井に衝突します。そしてバスBだけは衝突するものは何も有りません。Uチューブより少し難しいかも知れませんが、トンネルの瞬間の動きに対してバスAは図-8の如くバスの地面に対する衝突力Aを発生させます。同様にトンネルの瞬間の動きに対してバスCは同図の如くバスの天井に対する衝突力Cを発生させます。
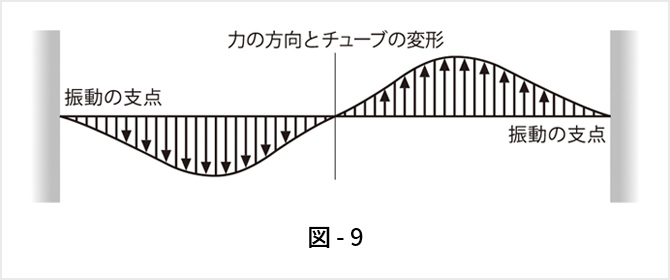
この衝突力ACが互いに逆方向に作用する為、この時初めてトンネルが図-9の様に変化を始めるのです。バスBには衝突する壁がありませんので、その位置も変化しません。何故ストレートチューブがサインカーブ状に変形するのかが、概念的に理解できたはずです。何故変形量が質量流量に比例するのか?これはもう説明する必要は有りませんね。もし解らなければもう一度、本稿の計測原理を読み直してください。
コリオリ流量計の原理に関する情報を記載しております。
最後に最も大切なことを一つ・・・それはアナログ検出器とデジタル検出器の違いです。
ここにアナログとデジタルの決定的違いが有ります。従って流量計を選定する場合はこの違いを十分認識した上で、適切な判断を下す事が大切です。